Platform over productie- en procesautomatisering
De menselijke hand wordt nog steeds gezien als de referentie bij uitstek als het gaat om de flexibiliteit van grijpende hulpmiddelen. De vraag naar humanoïde manipulatoren die een grote verscheidenheid aan grijpende varianten mogelijk maken, neemt steeds meer toe, in het bijzonder als het gaat om functionele en assisterende robotica. Bovendien neemt het vraagstuk van economische haalbaarheid in toenemende mate qua belang toe. SCHUNK breidt met de SIH zijn portfolio uit met een robuuste en aantrekkelijk geprijsde grijphand die flexibel kan worden ingezet in allerlei toepassingen.

Waar grijpers vroeger werden ontworpen met het oog op robuustheid, een lange levensduur en prestatievermogen, ligt de focus nu meer op de flexibiliteit van de beweging. Hoe nauwer mensen en robots samenwerken, des te groter zal de relevantie van humanoïde handen met vijf vingers zijn. “In extreme gevallen zullen mensen en functierobots gebruik maken van een en hetzelfde werkstation, inclusief alle gereedschappen en hulpmiddelen”, aldus Dr. Martin May, hoofd van Research/Advanced Technologies bij SCHUNK. Precies om die reden heeft SCHUNK al in 2017 zijn vijfvingerige hand SVH door DGUV laten certificeren als ‘s werelds eerste grijper voor collaboratieve samenwerking. Met behulp van in totaal negen aandrijvingen kunnen de vijf vingers alle mogelijke grijphandelingen uitvoeren. Verder kunnen tal van gebaren worden gemaakt, wat de visuele communicatie tussen mensen en de functierobot vereenvoudigt en de acceptatie voor het gebruik in een omgeving met mensen verhoogt.

Dr. Martin May, hoofd van de afdeling Onderzoek naar Research Advanced Technology bij SCHUNK GmbH & Co. KG te Lauffen/Neckar (Duitsland).
“In tegenstelling tot industriële grijpers associëren gebruikers emotionele aspecten met humanoïde grijphanden”, verklaart May. Dit betreft dan zowel manipulaties als gebaren. In lijn met de relevante applicatie heeft SCHUNK verscheidene grijphanden in zijn portfolio, lopend van tweevingerige handen die beperkt zijn tot de basisgrijpfuncties voor functionele robotica tot de voor industriële toepassingen geschikte drievingerige hand SCHUNK SDH en de complexe vijfvingerige hand SCHUNK SVH. Het meest recente model, de SCHUNK SIH, is evenzo voorzien van vijf vingers. Waar het door negen motoren aangedreven model SVH afgestemd is op de kenmerkende aspecten van een met hoge precisie werkende robot, is model SIH met zijn vijf motoren en trekkabelbediening meer gebaseerd op zijn menselijke evenknie met aders en spieren. Drie vingers van dit model kunnen onafhankelijk van elkaar bewegen. De twee kleinste vingers kunnen op hun beurt weer tegelijk bewegen als team. Het gevolg is dat model SIH flexibeler kan worden ingezet dan andere grijphanden. Bovendien is het model robuuster en de prijs ervan aantrekkelijker.

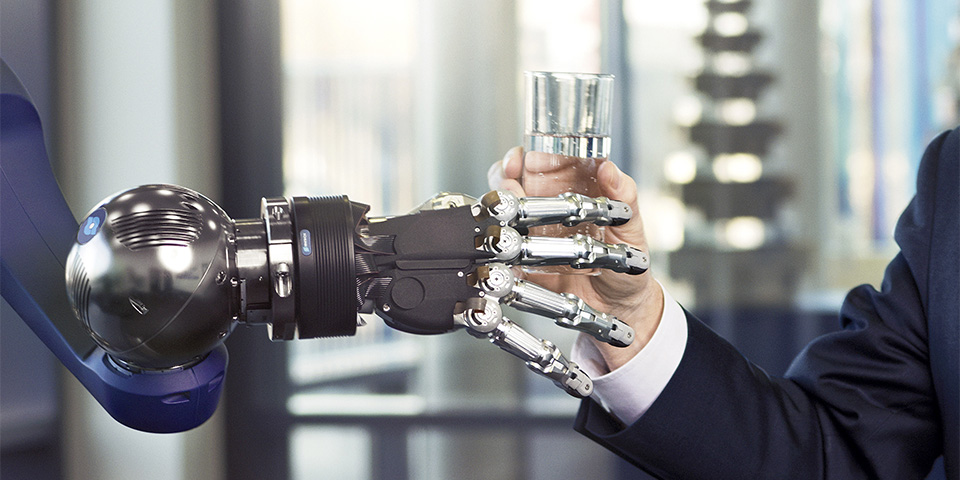
Voor assistentieverlenende robots en voor functionele robotica biedt de vijfvingerige hand SVH van SCHUNK een groot scala aan mogelijkheden.
Complexe programmering van de robot zal in de toekomst worden vervangen door een zelflerend, autonoom samenstel van componenten. Slimme grijpsystemen zullen hun doelobjecten met behulp van camera’s detecteren en op eigen gezag bepalen hoe ze zullen gaan grijpen. Grijpsystemen zullen op basis van datarecords en van algoritmen in staat zijn te detecteren en zullen daaraan en aan detectieprincipes de bijbehorende handelingen ontlenen. Voorts werkt SCHUNK R&D aan algoritmen voor het classificeren van verschillende geometrieën en opstellingen evenals aan algoritmen voor het ontwikkelen van optimale grijpstrategieën. Grijpsystemen moeten autonoom met onderdelen kunnen omgaan en moeten zelf de onderliggende grijpprocedures verder kunnen verfijnen.

In deze applicatie grijpt de vijfvingerige hand SVH van SCHUNK autonoom een willekeurig object dat naar believen is gepositioneerd.
Hoe groter de verscheidenheid van de te grijpen onderdelen en hoe ingewikkelder de taak, des te eerder zullen hier ook grijphanden worden ingezet. Dankzij sensorsystemen in de grijpvingers, de motorstroom en de in de grijphand ingebouwde intelligentie kan de kwaliteit van een greep worden gedetecteerd, geëvalueerd en zo nodig bijgesteld. Bovendien kunnen de eigenschappen van objecten zoals geometrie, maat en flexibiliteit via de grijper worden ‘gevoeld’ en worden doorgegeven naar systemen van hogere orde en op voorgeschakelde respectievelijk na-geschakelde bewerkingsstations. May: “Grijphanden voor veelzijdig gebruik zullen niet langer worden ingezet voor herhalende taken, maar zullen ze zich doorlopend aanpassen op nieuwe objecten en relaties. Ook zullen ze voortdurend hun grijpstrategieën kunnen optimaliseren.”
Louwers Mediagroep
Domein de Herten
Hertsbergsestraat 4
8020 Oostkamp, België



